Este é um breve post a respeito de seguidores de linhas, um robô de tração que, bem…, segue linhas.
O princípio básico é simples: Queremos fazer um robô que segue linhas e, enquanto se move para frente, avalie sua posição em relação à própria linha. A partir desse referencial, podemos programar o robô para tomar uma decisão quando ele detectar que mudou de estado. Observe o esquema:
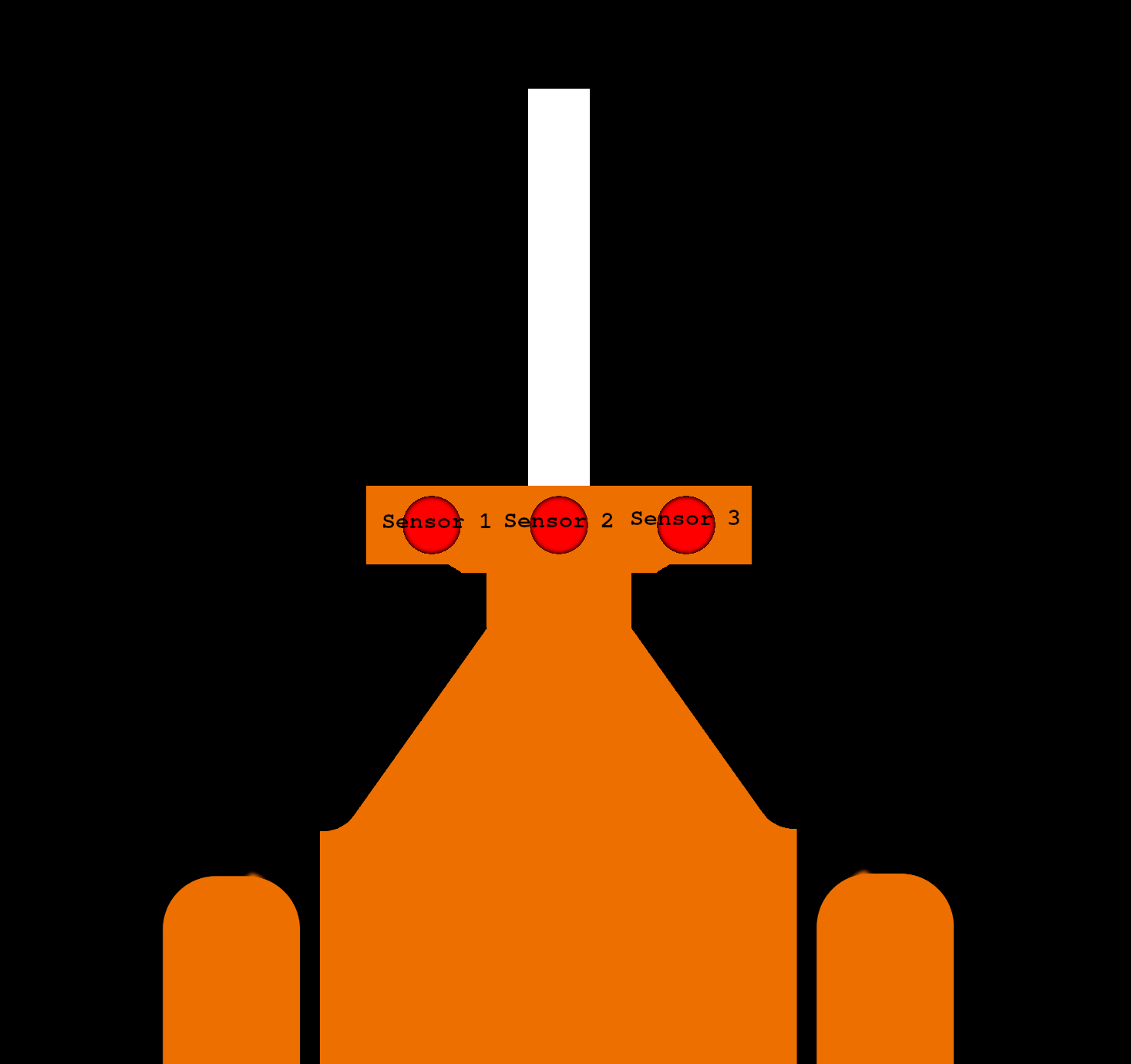
Olhando essa imagem acima, podemos começar a imaginar o algoritmo. Temos esses 3 sensores para avaliar a posição dele em relação à linha. É simples:
Se o sensor 1 detectar a faixa, sabemos que o carrinho está à direita da faixa, e deve virar levemente à esquerda. Se o sensor 2 detectar a faixa, estamos em cima da faixa, que é o que queremos. Vá para frente. Se o sensor 3 detectar a faixa, sabemos que o carrinho está à esquerda da faixa, e deve virar levemente à direita.
Claro que a estabilidade ainda é pouca. Poderíamos melhorar a resolução da entrada adicionando mais sensores e fazendo média ponderada, por exemplo. Além disso há outras variáveis de ambiente a serem analisadas: potência dos motores, tipo de bateria, e outros tipos de controle que podem se mostrar mais eficientes. Mas este é o princípio básico.
Gostou do projeto? Não deixe de nos contatar Sugestões, críticas, ou até mesmo seu “currículo” podem ser enviados